Einführung in die Systemanalyse mit MATLAB und Simulink
Systeme und Simulink
- Simulink ist ein MATLAB-Modul für die Simulation von technischen oder physikalischen Systemen.
- Was ist ein System?
- Struktur, die Eingangssignale in Ausgangssignale umwandelt.
- Besitzt meist einen internen Speicher (z. B. Integrator).
- Einfachste Form von Systemen: LTI-Systeme.
- linear: Ist nur aus linearen Übertragungsgliedern aufgebaut
(Addierer, Verstärker, Integratoren, Differentiatoren), alle Bauteilkennlinien sind linear. - zeit-invariant: Alle Bauteilparameter / Verstärkungsfaktoren bleiben während eines Versuches konstant.
z. B. konstante Masse eines Federschwingers, konstante Kapazität eines Kondensators.
- linear: Ist nur aus linearen Übertragungsgliedern aufgebaut
Beispiel
Leiten Sie die Differentialgleichung eines Feder-Masse-Dämpfer-Systems her. Wandeln Sie die Differentialgleichung in die Übertragungsfunktion um.
- Eingangsgröße: Externe Kraft \(F_E\).
- Ausgangsgröße: Position des Massestücks \(y\).
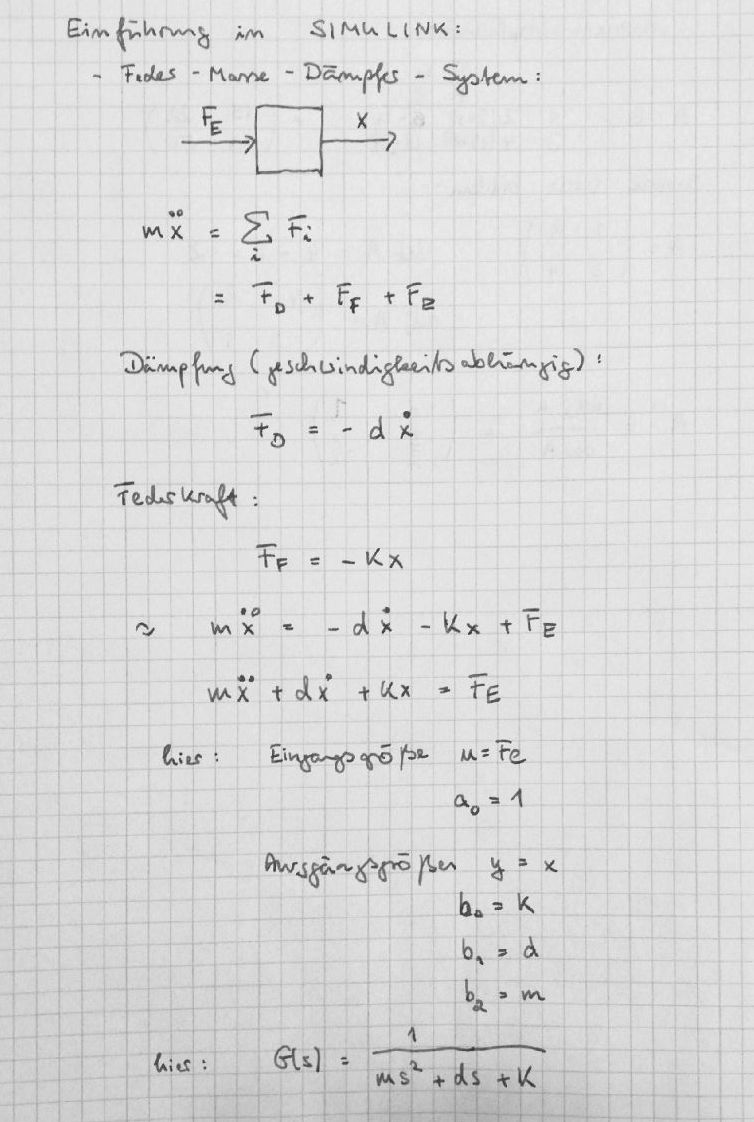
Differentialgleichung allgemein:
Übertragungsfunktion allgemein:
MATLAB-Funktionen für die Systemanalyse
- Erstellen der Übertragungsfunktion mit der
tf-Funktion:
-
Analyse des Systemsverhalten mit Hilfe der Polstellen der Übertragungsfunktion:
\(s_{P1,2} = -0.25 \pm 3.1524 i\)
Mögliche Schlussfolgerungen:
- Das System ist stabil: \(\text{Re}\{s_P\} > 0\).
- Das System ist schwingungsfähig: \(\text{Im}\{s_P\} \neq 0\).
- Anzeige der Sprungantwort:
Die Sprungantwort ist das Ausgangssignal des Systems, wenn der Eingang mit einem Sprung von 0 auf 1 belastete wird.
- Anzeige der Impulsantwort:
Antwort des Systems auf ein unendlich starken und kurzen Impuls.
- Anzeige des Frequenzgang:
Der Frequenzgang gibt an, wie stark das System mitschwingt, wenn ein Eingangssignal mit entsprechender Frequenz aufgeprägt wird.
Lösung
Interpretation:
- Bei kleinen Frequenzen schwingt das System gut mit.
- Bei großen Frequenzen kommt das System nicht mehr hinterher.
- Es gibt eine Resonanzfrequenz, bei der das Ausgangssignal um ca. 20 dB zunimmt
→ \(20\,\text{dB} \hat = 10\).
Systemanalyse mit Simulink
- Starten der Simulink-Umgebung mit dem
simulink-Befehl. - Erstellen eines neuen Modells.
- Das System muss in Simulink als Blockschaltbild aufgebaut werden.
Lösung
-
Ein Blockschaltbild besteht in Allgemeinen aus aus folgenden Grundelementen:
- Verstärker (Gain): \(x_A = k \cdot x_E\)
Als Verstärkungsfaktor können Variablen aus dem Workspace verwendet werden:m, d, k. - Addierer (Sum): \(x_A = x_{E1} + x_{E2}\).
- Integrator: $ x_A = \int x_E \,\mathrm d t + x_A(0)$.
- Verstärker (Gain): \(x_A = k \cdot x_E\)
- Die Differentialgleichung muss in die Integralform umgewandelt werden, um als Blockschaltbild dargestellt werden zu können.
- Aufbau:
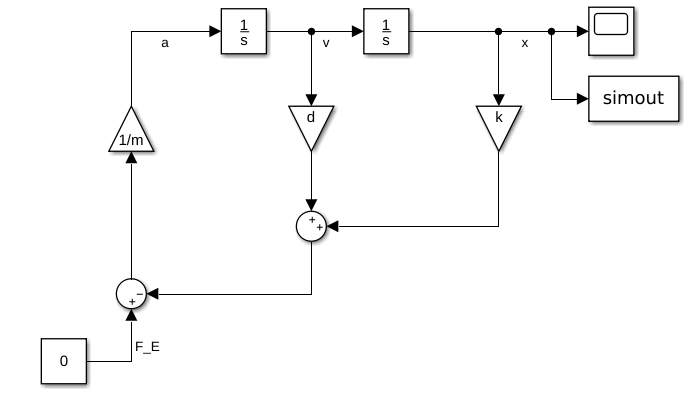
- Analyse der homogenen Lösung (Übergang des Systems in den energiefreien Zustand):
- Verwenden der Konstante 0 als Eingangssignal.
- Setzen der Anfangswerte der Intergratoren: \(v_0\), \(x_0\).
- Ausgangssignal kann mit dem Scope angezeigt werden.
- Alternativ wird die Variable
simoutin den MATLAB-Workspace exportiert:
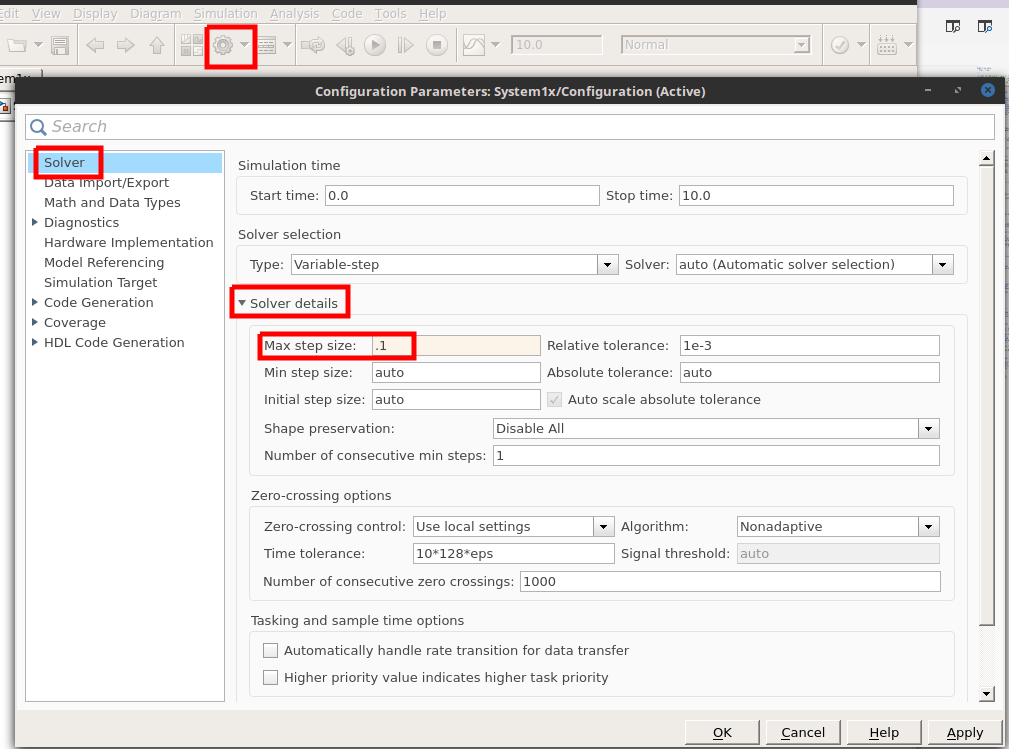
- Verringern der Schrittweite:
Settings → Solver → Solver details → Max step size: 0.1
Aufgabe
Untersuchen Sie die Systemantwort bei verschiedenen Eingangssignalen.
Modellieren Sie die Systemantwort bei einer Sinus-Schwingung am Eingang. Wie verhält sich das System bei der Resonanzfrequenz?
Aufgabe
Leiten Sie die Differentialgleichung und die Übertragungsfunktion einen RC-Tiefpasses her.
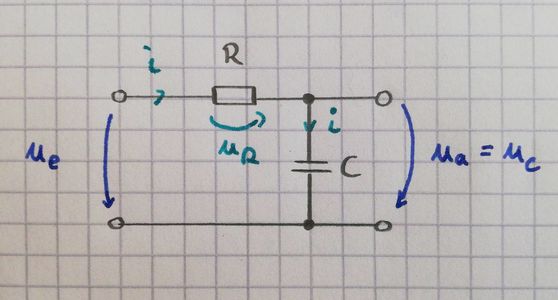
Lösung
- Eingangssignal: \(u_E\).
- Ausgangssignal: \(u_A = u_C\).
-
Maschengleichung:
\[ u_E = u_R + u_C \]
-
Bauelementegleichungen:
\[ u_R = R \cdot i \]\[ i = C \frac{\mathrm d}{\mathrm d t} u_C \]
-
DGL:
\[ u_E = R C\, \dot u_A + u_A \]
-
Übertragungsfunktion:
\[ G(s) = \frac{1}{R Cs + 1} \]
Aufgabe
Lassen Sie sich die Sprungantwort, Impulsantwort und Bode-Diagramm in MATLAB anzeigen.
Aufgabe
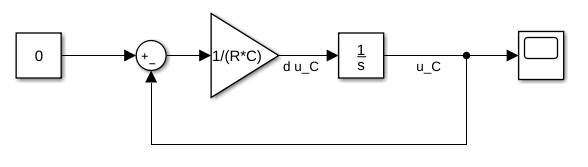
Bauen Sie das System in Simulink auf. Simulieren Sie den Entladenvorgang mit folgenden Bedingungen:
Lösung
Umstellen der Differentialgleichung nach der höchsten Ableitung des Ausgangssignals:
Aufgabe
Simulation bei einer Sinusschwingung variabler Frequenz am Eingang. Was zeichnet einen Tiefpassfilter aus?